

����һ������
�������ڸۿ�ˮ���л����ͺ��Ͽ���ˮ��������Բ��죬�״��豸��������������ƣ�����ڸۿ�ˮ��ʹ���״�Ӧ���ں��Ͽ���ˮ���������𡣱��ĸ����Ϻ��۵ĺ��л������״�ʹ����������״��豸���������ơ�ͼ����ڵȷ��棬̽���ڸۿ�ˮ��ʹ���״�ʱ��ע����������Ѽ�����Աע�����״��豸���������ƺ��Ӻ��л����������ķ��ա�
���������ڸۿ�ˮ��ʹ���״��豸�ľ�����
�����ۿ�ˮ���ڴ���ͨ���ܶȴ����������һ���Ƶ������Щ�ᵼ���״������ȶ�����Ŀ�꣬����Ŀ�����ݾ��ȡ�
���� ( һ ) �״��Ŀ��ֱ�����������
��������IMO�״��豸���ܱ�MSC.192 ( 79 ) �Ĺ涨����ƽ���ĺ���ʹ��1.5������С�����̣������̵�50%��100%��Χ�ڣ����������ľ���ֱ���Ӧ������40�ף���λ�ֱ���Ӧ������2.5��[1]����Ŀ������С��40��λ��С��2.5��ʱ���״�������ֱ�Ŀ�꣬Ҳ���ȶ�����Ŀ�ꡣ���ֳ����״�ֱ��������������ͨ���ܶȴ�ĸۿ�ˮ���Ϊ������
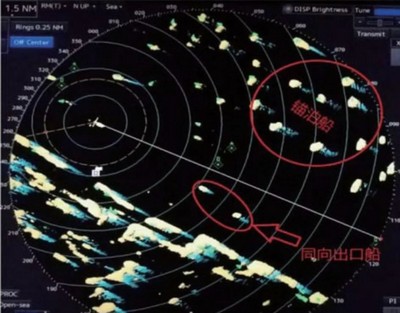
����ͼ1���Ϻ����ϲۺ������ڸ߷�ʱ������״�ͼ��ͼ�г��������صĻز�ճ��������ԭ����Ǵ����ܶȹ���Ŀ������̫�����������״��Ŀ��ֱ��������״����ֱ���Щճ����һ���Ŀ��ز���Ҳ��ȷ�����ȶ�������ЩĿ�ꡣ����Щ�пɷֱ��Ŀ�꣬��ʹ�״��ܹ������ڸ��ٵĹ�����Ҳ������Ŀ�궪ʧ�������Ի�ȡĿ���ȷ�˶����ݡ�
 ����
����
ͼ1 �Ϻ��۽��ڸ߷��״�ͼ��
����( �� ) �״���ٴ���Ŀ����Ϣ������ʱ
�����״ﲶ��Ŀ�����Ҫ��Ŀ����Ϣ�����˲������������ȶ��ظ���Ŀ�ꡣ���˲������У��״���Ҫ�ۻ�Ŀ��Ĺ������ݣ��˳����ִ�������ƽ��Ŀ�꼰�������˶��������ȵIJ���Ӱ��[2]���������Щ���̺��״����Ԥ��Ŀ��δ���ĺ���ͺ��٣����㲢���Ŀ����˶����ݡ����˲��Ĺ��̿��Կ������״ﲶ��Ŀ���Ҫ�ӳ�һ��ʱ��������Ŀ����˶����ݡ���Ŀ�귢����������ʱ�������˲����̵ĺ�ʱ�������״ﲻ�ܼ�ʱ����Ŀ��Ļ����仯����Ŀ���˶���Ԥ�������ʱ���˲�����������״��Ŀ�������������ʱ�����Ӱ�����״�Խ����롢����Ŀ��ĸ��پ���[2]��
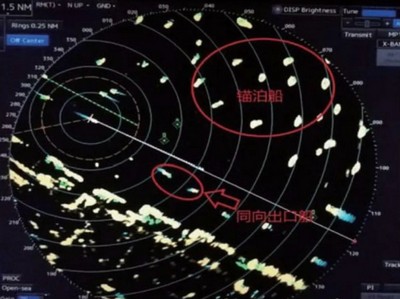
����ͼ2�е�3��Ŀ�� ( ��ͷλ�� ) �����Ϻ��۱��ۺ�����ҵ�IJ�����������ҵ�����ж�δ�Խ�������������ΪƵ����ͼ2�������ͷʱ�����㡣ͨ��ͼ��3��Ŀ�����β�������Կ����������Ѿ�����˵�ͷ������ʼ�������У�������ʸ��ȴ��Ȼָ�����Ϸ��������Դ�������Ը�����Ŀ��ʱ���״��ṩ��Ŀ���˶����ݲ����ɿ��������������������ݡ�

ͼ2 ����Ŀ���״�ͼ��
���������ۿ�ˮ�����״�ͼ��ĵ���
�������ں��Ͽ���ˮ��ĺ��л����ۿ�ˮ����ڽϴ����𣬴����Ӻ��Ͻ���ۿ�ˮ��ʱ���״�ز���ɱ�ø�Ϊ���ӡ��ؼ�С�״����̣�ֱ�����ú��ϵ�ͼ����ڲ��������Է����״�Ӧ�����ܡ�
����( һ ) �״�ͼ��Ӧ�溽�л����ı仯�������Ż�
�����ڸۿ�ˮ���״�ز������Ҫ�Ⱥ��Ͽ���ˮ���Ϊ���ӡ����˺��ϳ����ĺ����Ӳ�����ѩ�Ӳ��⣬���ж��ּٻز�������Ҫ����Ϊ���ڸۿ�ˮ��Ŀ����������������¥��ǿ����Ŀ��࣬ʹ���״ﲨ�����Ϊǿ�ң����γɶ��ּٻز����Ӳ���ʹ���״�ʱ��Ӧѡ����ʵ����̺�������ȣ�������Եص���������Ӳ����ƿ�ť��ʹ�״�ͼ���뺽�л���ʱ�̱���ƥ�䡣
�����Դ������Ϻ��۱��ۺ������ں���Ϊ���������ɳ����ǰ�������ܶ�ͨ��������������ˮ����С�洬�����ʱӦ���ȿ����״����СĿ���̽�⣬Ӧ�ʵ��Ӵ����沢ѡ������塣�����ɳ�������ܶȿ�ʼ���ǿ����Ŀ�����࣬С�洬�����������٣���ʱӦ���ȿ����״��̽�⾫�Ⱥ�Ŀ��ֱ�������ѡ��խ���岢�ʵ���С���档
����( �� ) ע������״�ͼ��ʱ������֮���ì��
�����ڵ����״�ͼ��ʱ����Щ����֮�������ǻ���ì�ܵġ����磬Ϊ������״����СĿ���̽����������Ӵ����棬ѡ������������ȣ�������ܵ�������Ŀ��ز�ʧ�棬�Ӳ���ǿ���״�̽�⾫�Ⱥ�Ŀ��ֱ������͡�Ϊ��Ӧ�Ըۿ�ˮ���ܶȸߡ�ǿ����Դ��ĺ��л�����ʹ���״�ʱӦ��С���棬ѡ��խ���壬������״��̽�⾫�Ⱥ�Ŀ��ֱ���������ή���״����СĿ���̽����������˺����ҵ�һ���ʺ����к��л����ĵ��ڲ������״�ͼ����ڵĹ���ʵ�������״������֮���ƽ��Ĺ��̣��������ҵ�ijһ�����ʹ���״�ĸ������ܶ��ﵽ���״̬��
�����ġ��ۿ�ˮ��ʹ���״�ʱ��ע������
����( һ ) �״ﲻ�ʺ��ڸۿ�ˮ�����
����1.�״��CPA���Ȳ�������ۿ�ˮ�����Ҫ��
��������IMO�״��豸���ܱ�MSC192. ( 79 ) �涨�����״��Ŀ�꽨���ȶ����ٺ�CPA����Ϊ±0.3����[1]���ں��Ͽ���ˮ������CPAͨ��������2�������ң�±0.3�����CPA�����ܹ���֤��ȫ���ڸۿ�ˮ������CPA���ܻ��С�����м�ʮ�ס��������Ϻ��۵ı��ۺ��������ֽ���������ˮ���ڣ�������CPA�ܿ���С��0.1���������CPA�����Ѿ�ԶԶ�������״��豸�����ܱ����������ڱ�������������Ϊ��CPA���Ƶ�0.8�����Բ������㺽����Ҫʱ���״��ṩ����Ϣ��ֻ����Ϊ�ο�[2]����ˣ��ڴ����ܶȽϴ�ĸۿ�ˮ���ܼ������״����ݲ�ȡ������ʩ��
����2.�״����Ŀ���˶����ݺ�ʱ����������ۿ�ˮ�����Ҫ��
������IMO�״��豸���ܱ�MSC192. ( 79 ) �й涨���״�Ӧ��3��������ʾĿ��Ԥ���˶�[1]�����״ﲶ��Ŀ�꣬����������㾫��Ҫ���Ŀ���˶����ݣ����ڽ�3���ӵ���ʱ��ʹ���״����ʱ��ͨ��Ӧѡ��12��������[3]�����ǿ��ǵ����״������ԭ��������������Ƶĺ������������ڸۿ�ˮ���ڣ��״��ʹ��3�����1.5����������С������ ( ���ֽ��ڶ�ʹ��0.75�������� )����Ծ�����˽���Ŀ�꣬3���ӵĵȴ�ʱ��������������������ײ���ա���������ʾ��ȫ����ÿ�����״���ʱ�����ײ�Ĵ�����������֮��[4]��
�����ڸ��ӵĺ��л����У��״�������ֱ�Ŀ�꣬����Ŀ�궪ʧ��Ŀ�꽻����������ʱ�����⣬Ҳ���ܳ�����Ŀ�����ݳ����״����ܱ�������Ŀ�����ݲ����š��״�Ƶ�����������⡣��Щ����ʹ���״��ڸۿ�ˮ�������ڱ�����
����( �� ) �ڸۿ�ˮ��ʹ���״�ʱ���ʺ�ʹ�ö�ˮ�ٶ�
�����ڸۿ�ˮ����ʱ���״�Ŀ�������������Զ���ں��ϣ����и��ꡢ��ê���Ⱦ�ֹĿ�꣬���д������д��������˶�Ŀ�ꡣ������Ա����Դ����״�Ŀ��ʱ�������ܽ�ע����ƽ�������ÿ��Ŀ�ꡣ��ˣ�����ڴ���Ŀ���п���ȷ���ҳ�Σ��Ŀ�꣬�Ը��ڰ�ȫ����������Ҫ���塣�״����β�����ܿ�����������Ŀ�������[4]����Ҫ��Чʹ�øù��ܣ�������ȷѡ�����ٶȡ�
����ͼ3��ͼ4���Ϻ��۽���ê�س��ں���ʱ������״�ͼ��ͼ3�б����ٶ�ѡ����Ƕ�ˮģʽ����ģʽ�£���ê��������Ⱦ�ֹĿ���������ѹ���෴�ķ�����ٶ��ƶ�������ʾ�Ķ�ˮ��β�����˶�Ŀ��Ķ�ˮ��β�������ƣ�����ͨ���״�������ֲ��ҳ�Σ��Ŀ�ꡣ�����Ķ�ˮ��ʸ��Ҳ����ֱ��ȷ�ط�ӳ�����硢��ѹ��Ĵ�С�������ڼ�ش�λ�ͱ��ù̶�Ŀ�꣬�ر�����ˮ�����ӵ�ˮ����������ĺ��з��ա�ͼ4�б����ٶ�ѡ����ǶԵ�ģʽ����ģʽ�£�������Աͨ���״��ܿ��ٷֱ����Щ��Ӧ���ص��ע��Ŀ�꣬����ʱ�����ձ����ķ硢��ѹ������ڸۿ�ˮ��İ�ȫ���С�
ͼ3 ��ˮ���˶�ģʽ�״�ͼ��
ͼ4 �Ե����˶�ģʽ�״�ͼ��
������ʵ�ʹ����У���������Щ����Ϊ�������Ҫ����ۿ�ˮ����Լ��ѡ���ˮ�ٶ� ( ��ͼ5��ʾ )��������봬��˾��ϵ�ļ��Ĺ涨�йء���Щ��˾Ϊ�˹�ܿ��ܲ����ķ��ɷ��գ�����ϵ�ļ�����ȷҪ�����ʻԱ���ڸۿ�ˮ��ʹ���״�ʱѡ���ˮ�ٶȡ���Ըۿ�ˮ���ӵĺ��л���������Ϊ�˹�ܷ��ɷ��գ������Ǿ��廷���������Dz����ǵģ�Ҳ������Σ�յġ�����˾���ƶ������ϵ�ļ�ʱӦ�ø�Ϊϸ�£���ý��ۿ�ˮ��ͺ��Ͽ���ˮ�����ֿ������ֱ��ƶ���Ӧ��ϵ�ļ���
ͼ5 ij���״�ʹ�ù���
����( �� ) ����ʹ���״���Զ��Ӳ����ƹ���
�����״��Զ��Ӳ�������Ҫ���Զ������Ӳ����� ( AUTO-SEA )���Զ���ѩ���� ( AUTO-RAIN )���Զ����Ӳ� ( CFAR ) �ȡ��Զ��Ӳ����ƹ���ͨ��ֻ�ʺϻز���ɱȽϼ�ˮ��[2]���ڸۿ�ˮ���״�ز���ɸ��ӣ�������������Ŀ��ز����Ӳ����Զ��Ӳ���������Ч������Щ���Ӷ����Ļز������ܵ�����СĿ��ز��������Ӳ����ơ��ر��ǵ������״ﴦ�ڲ��ȶ���ʾģʽ�£���������ı仯������Ŀ��ز��IJ��ȶ�����СĿ��Ļز������ױ����ơ��������ʹ���Զ��Ӳ����ƹ���ʱ��Ҫ��Ϊ�����ضԴ���СĿ�꣬ͬʱҪ�����ڲ��ȶ���ʾģʽ��ʹ���Զ��Ӳ����ƹ��ܡ�
�����塢������
����������Ա��ʹ���״�ʱ��Ӧ��ֿ��DZ�����Χ�ĺ��л������״��豸���������ơ������ǽ���ۿ�ˮ��ʱ��Ҫע�⸴�ӵĺ��л�������״��豸��������Ӱ�죬���������״�IJ��ֹ��ܲ����á���Ӧǿ���ڸۿ�ˮ����ʹ���״�ı������ܣ���Ӧ����ʹ���״�Ķ�λ���������t�����۲�����������ں��а�ȫ�Ĺ��ܡ�ͬʱ��Ϊ�˸��õ�ʹ���״Ӧ��ѡ����ʵ���ʾģʽ���ٶȣ������״�ͼ������ʵ��ĵ��ڡ������ں��Ͽ���ˮ����״����ã������������״��豸��Ӧ�����ܣ�����������ĺ��з��ա�


